






SIMINICS PAVO 2D TOF LiDAR Lase Radar Wall Floor Screen Interactive Multi-Touch Robot Navigation Obstacle Avoidance for Indoor and Outdoor (SIMO-LS-20H)

 4.5 (76 items)
4.5 (76 items)
 Limited Time Sale
Limited Time SaleUS$329.40 cheaper than the new price!!
Free cash-on-delivery fees for purchases over $99
Product details
| Management number | 212366591 | Release Date | 2026/04/06 | List Price | US$219.60 | Model Number | 212366591 | ||
|---|---|---|---|---|---|---|---|---|---|
| Category | |||||||||
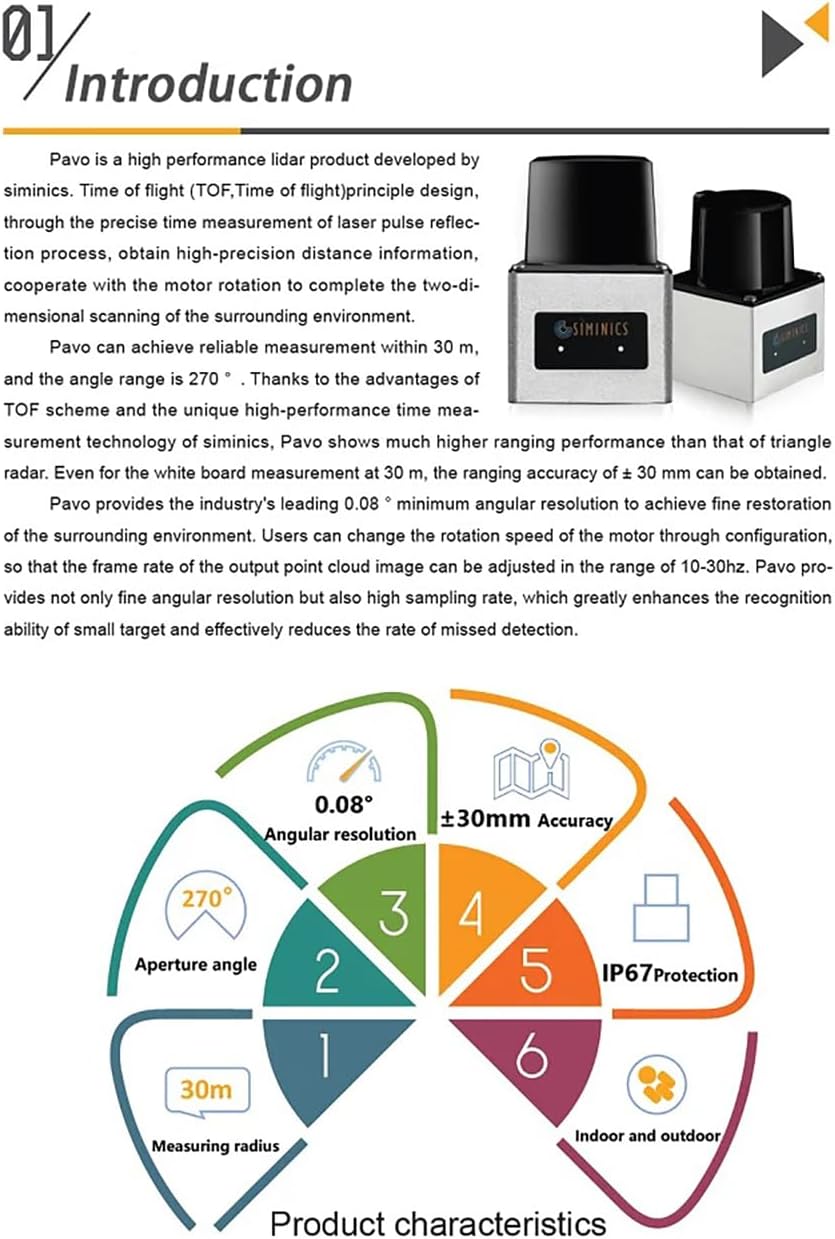
Product Description Innovate environmental perception and empower intelligent mobility Pavo is a high-performance 2D TOF lidar developed by siminics. It adopts the Time of Flight principle. By precisely measuring the reflection time of the laser pulse and cooperating with the rotation of the motor, it achieves 270° two-dimensional environmental scanning. Provide millimeter-level precision spatial perception capabilities for the fields of industrial automation and robotics. 🔥 Core Strengths Precise and fearless: Effective ranging of 30 meters, ±30mm accuracy, 0.08° resolution point cloud, stable operation under strong light (> 50,000 lux). Flexible control: The motor speed is adjustable, and the point cloud frame rate can be freely switched (10/20/30Hz), balancing response speed and data density. Rock-solid: IP67 protection, storage temperature range -30℃ to 75℃, military-grade shock resistance design (full frequency band vibration test from 10 to 200Hz). 🚀 Application scenarios Industry: AGV obstacle avoidance and navigation, path planning for warehouse robots, and safety protection in factory areas Commercial: Autonomous positioning of service robots, environmental perception of hotel delivery vehicles Innovation: Unmanned driving research, 3D map reconstruction ⚙ Technical Specifications Power supply: DC 12-24V | Power Consumption: 2W (Typical) Scanning frequency: 10-30Hz | Laser grade: Class I (905nm) Interface: 100BASE-TX Ethernet | Startup time: <10 seconds Dimensions: 50×50×76 mm | Weight: 148g (No cable)
- ⏱ High precision TOF ranging technology:With a measurement accuracy of ±30mm (at 30 meters), it far exceeds the triangular radar, easily identifying small obstacles and reducing the rate of missed detection.
- 🌐 270° ultra-wide-angle scan & 0.08° industry-leading resolution:The point cloud frame rate is adjustable from 10 to 30Hz. Combined with ultra-high resolution, it accurately restores the details of complex environments and enhances the ability to recognize small targets.
- 🏁 30-meter stability detection & strong environmental adaptability:Supports 30-meter detection of objects with 90% reflectivity (10-meter detection of objects with 10% reflectivity), IP67 protection, wide temperature range operation from -10℃ to 55℃, fearless of complex indoor and outdoor scenarios.
- 🤖 Plug and play, multi-scenario solutions:One-click configuration of motor speed, suitable for various applications such as AGV obstacle avoidance and navigation, service robot positioning, industrial safety protection, and unmanned vehicle environmental perception.
- 📦 Military-grade reliability & easy integration:5-year motor life, passed the XYZ three-axis vibration test (20g impact), 100BASE-TX Ethernet interface, 148g lightweight design (excluding cables).
| UPC | 762744327613 |
|---|---|
| Brand | ZICZNT |
| Manufacturer | SIMINICS |
| Model Number | SIMO-LS-20H |
| Warranty Description | One year warranty |
Correction of product information
If you notice any omissions or errors in the product information on this page, please use the correction request form below.
Correction Request Form